8.4 KiB
LifecycleManager (assignments::two::g2_2025_lifecycle_node)
Overview
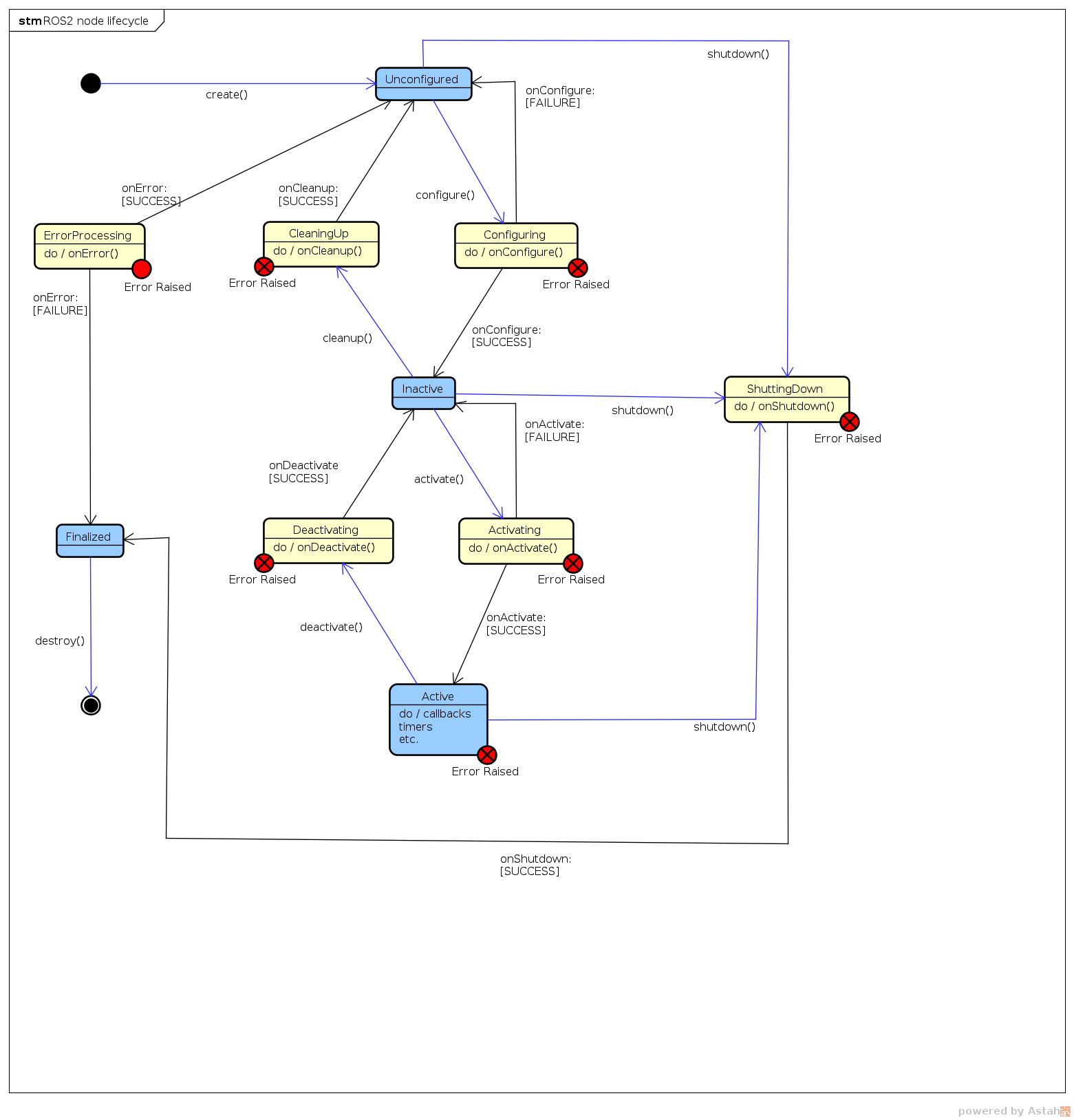
The LifecycleManager is the core lifecycle-aware node responsible for managing the IMU reader system's operational states and hardware communication. It orchestrates transitions between configuration, activation, and deactivation phases, abstracting the complexity of dual communication backends (serial and MQTT) into a unified interface.
Implementation Details
Parameters
device_path(string, default: "/dev/ttyUSB0"): Serial device path for hardware connection (e.g., USB serial adapter).baudrate(int, default: 115200): Serial communication baud rate in bits per second.comm_t(string, default: "serial"): Communication type selector—either "serial" or "mqtt" to determine which backend to use.
Constructor
LifecycleManager()
- Initializes ROS2 lifecycle node with name
lifecycle_manager - Declares and reads configuration parameters:
device_path,baudrate, andcomm_t - Creates a shared instance of
HardwareInterfacefor managing all hardware operations - Logs initialization status and readiness
Core Functions
CallbackReturn on_configure(const State&)
- Enters the Unconfigured → Inactive transition
- Checks the
comm_tparameter to route initialization:- MQTT mode: Calls
hw_interface->mqtt_configure()to set up the MQTT client and broker connection - Serial mode: Calls
hw_interface->open_device(device_path_, baudrate_)to open and configure the serial port
- MQTT mode: Calls
- Returns
SUCCESSif device initialization succeeds,FAILUREif serial/MQTT setup fails - Logs configuration status and any errors
- Example test code (currently commented) demonstrates direct JSON parsing for validation
CallbackReturn on_activate(const State&)
- Enters the Inactive → Active transition
- Checks the
comm_tparameter to start the appropriate reader:- MQTT mode: Calls
hw_interface->mqtt_reader()to attach MQTT callbacks and begin receiving messages - Serial mode: Calls
hw_interface->start_read()to spawn a background thread that continuously reads from the serial device
- MQTT mode: Calls
- Returns
SUCCESSafter reader startup - Logs activation status and selected communication type
CallbackReturn on_deactivate(const State&)
- Enters the Active → Inactive transition
- Checks the
comm_tparameter to cleanly stop operations:- MQTT mode: Calls
hw_interface->close_mqtt_conn()to disconnect from the broker and clean up resources - Serial mode:
- Verifies device state with
hw_interface->is_device_open() - Calls
hw_interface->stop_read()to signal the reader thread to exit and joins it - Calls
hw_interface->close_device()to release the serial port
- Verifies device state with
- MQTT mode: Calls
- Returns
SUCCESSafter cleanup completes - Logs deactivation and resource release
CallbackReturn on_shutdown(const State&)
- Enters the Inactive → Finalized transition
- Performs final shutdown logging
- Returns
SUCCESS
CallbackReturn on_cleanup(const State&)
- Called during error recovery or explicit cleanup commands
- Performs resource cleanup and state logging
- Returns
SUCCESS
Communication Architecture
Dual Backend Support
The LifecycleManager provides a flexible, pluggable communication architecture via the comm_t parameter:
Serial Communication Path
-
Configuration Phase (
on_configure):- Opens the serial device at the path specified by
device_pathand baudrate - Validates device readiness
- Opens the serial device at the path specified by
-
Activation Phase (
on_activate):- Spawns a background reader thread via
hw_interface->start_read() - Thread continuously polls the serial device with a timeout
- Reads are accumulated in a partial buffer, split on newline, and parsed as JSON
- Each valid JSON IMU payload is parsed into a
sensor_msgs::msg::Imuand published to the ROS topicimu/data
- Spawns a background reader thread via
-
Deactivation Phase (
on_deactivate):- Signals the reader thread to stop via atomic flag
- Joins the thread to ensure clean termination
- Closes the serial device
MQTT Communication Path
-
Configuration Phase (
on_configure):- Creates a persistent MQTT async client pointing to the broker at
SERVER_ADDRESS(default:tcp://localhost:1883) - Initializes MQTT callback infrastructure
- Creates a persistent MQTT async client pointing to the broker at
-
Activation Phase (
on_activate):- Attaches MQTT callbacks to the client
- Subscribes to the topic specified by
TOPIC(default:esp32/imu) - The async client runs background threads to receive messages
-
Deactivation Phase (
on_deactivate):- Disconnects from the broker
- Cleans up MQTT client and callback resources
Lifecycle Commands
To interact with the LifecycleManager from the command line, use the following ROS2 lifecycle service calls:
# List current lifecycle state
ros2 lifecycle list /LifecycleManager
# Transition: UNCONFIGURED -> INACTIVE
ros2 lifecycle set /LifecycleManager configure
# Transition: INACTIVE -> UNCONFIGURED
ros2 lifecycle set /LifecycleManager cleanup
# Transition: INACTIVE -> ACTIVE
ros2 lifecycle set /LifecycleManager activate
# Transition: ACTIVE -> INACTIVE
ros2 lifecycle set /LifecycleManager deactivate
# Transition: INACTIVE -> FINALIZED
ros2 lifecycle set /LifecycleManager shutdown
Data Flow
Serial Data Flow
Hardware Device
↓
Serial Port (/dev/ttyUSB0)
↓
Background Reader Thread (start_read)
↓
Partial Buffer Accumulation
↓
JSON Line Extraction & Sanitization
↓
parse_data() ← Deserializes JSON to sensor_msgs::msg::Imu
↓
imu_publisher → ROS2 Topic (`imu_data`)
MQTT Data Flow
MQTT Broker (localhost:1883)
↓
MQTT Async Client (Background Thread)
↓
Subscription to Topic (esp32/imu)
↓
MQTT Callback Handler
↓
parse_data() ← Deserializes JSON to sensor_msgs::msg::Imu
↓
imu_publisher → ROS2 Topic (`imu_data`)
Error Handling
- Serial Device Failures: If
open_device()fails during configuration,on_configure()returnsFAILUREand the system remains in theUNCONFIGUREDstate - Communication Errors: JSON parse errors from invalid payloads are caught and logged without crashing the node; the reader continues listening for the next message
- Thread Safety: The reader thread uses an atomic flag (
reading_) for clean stop signaling and ensures all resources are properly joined before returning fromon_deactivate()
Design Patterns
- Strategy Pattern: The
comm_tparameter enables runtime selection of communication backend without changing node code - Lifecycle Pattern: Follows ROS2 managed node pattern for predictable initialization, startup, and shutdown sequences
- Thread Safety: Atomic flags and resource cleanup ensure the reader thread can be safely started and stopped
- Buffer Accumulation: Partial message buffering handles fragmented serial reads and ensures complete JSON objects are parsed
Integration with HardwareInterface
The LifecycleManager delegates all hardware operations to the HardwareInterface class:
| Operation | Method | Lifecycle Phase |
|---|---|---|
| Open serial device | open_device(path, baud) |
on_configure |
| Start reading | start_read() |
on_activate |
| Stop reading | stop_read() |
on_deactivate |
| Close serial device | close_device() |
on_deactivate |
| Configure MQTT | mqtt_configure() |
on_configure |
| Start MQTT reading | mqtt_reader() |
on_activate |
| Close MQTT connection | close_mqtt_conn() |
on_deactivate |
| Parse JSON payload | parse_data(json_string) |
on_activate (continuous) |
| Publish IMU message | publish_imu_data(imu_msg) |
on_activate (continuous) |
Usage Example
# Launch the node with serial communication at /dev/ttyUSB0, 115200 baud
ros2 run g2_2025_imu_reader_pkg g2_2025_lifecycle_node \
--ros-args \
-p device_path:=/dev/ttyUSB0 \
-p baudrate:=115200 \
-p comm_t:=serial
# Alternatively, launch with MQTT communication
ros2 run g2_2025_imu_reader_pkg g2_2025_lifecycle_node \
--ros-args \
-p comm_t:=mqtt
# In another terminal, configure and activate the lifecycle
ros2 lifecycle set /LifecycleManager configure
ros2 lifecycle set /LifecycleManager activate
# Subscribe to published IMU data
ros2 topic echo /imu_data
# Deactivate and shutdown
ros2 lifecycle set /LifecycleManager deactivate
ros2 lifecycle set /LifecycleManager shutdown